Sign In
Create your first automation in just a few minutes.Try Studio Web →

UiPath Unattended Robots Auto Scaling
by UiPath
1
Solution
362
Summary
Summary
UiPath Robots Auto Scaling (RAS) is a workflow based solution that helps optimize IT Infrastructure costs by making RPA Deployments run more efficiently.
Overview
Overview
The Robots Auto Scaling solution is implemented with the help of the official UiPath IT Automation activities - they empower us to automate use cases from all areas of our IT Ecosystem, in both on-premises datacenters and public clouds.
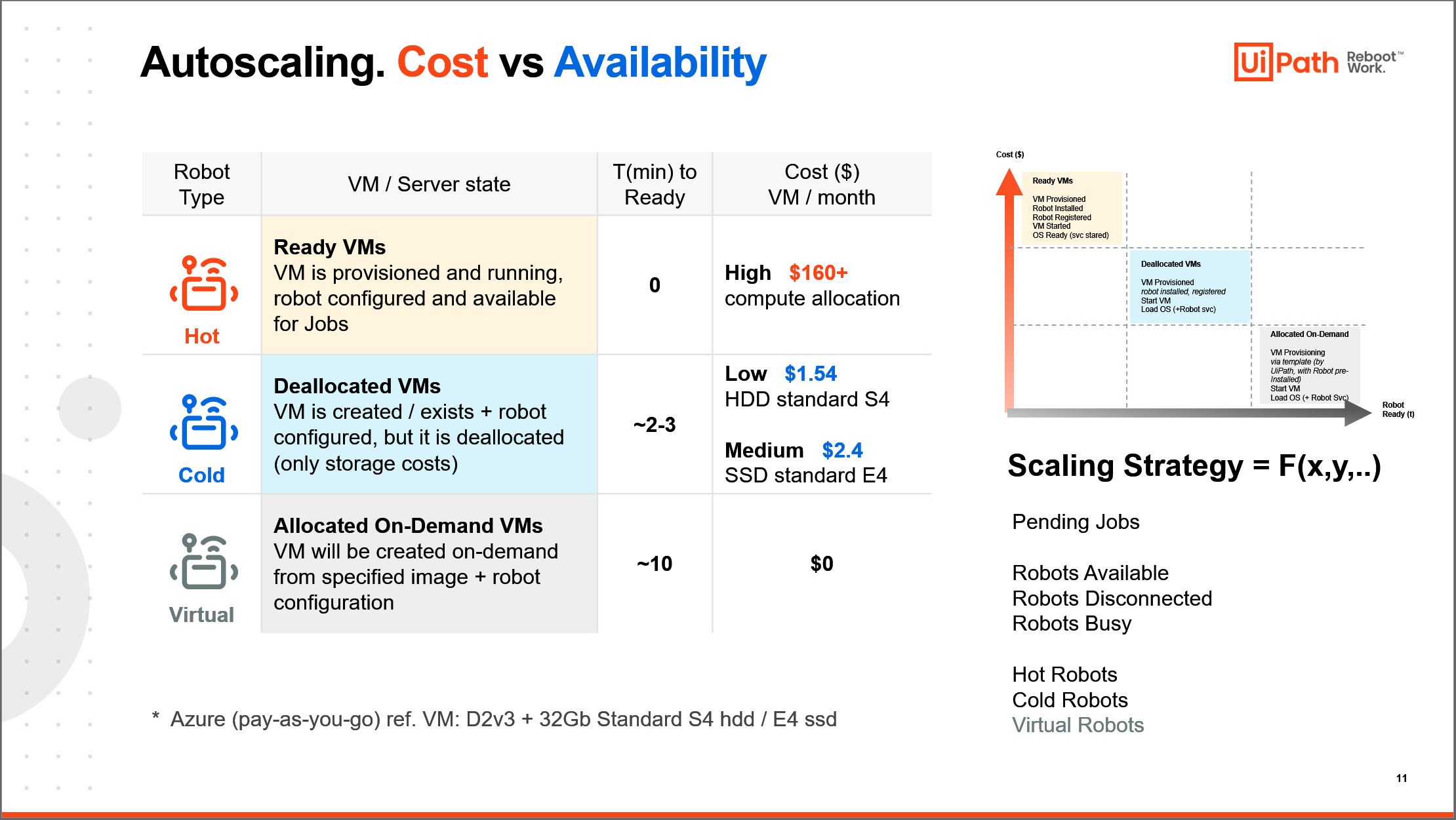
As part of the auto-scaling process, the robot machines are started / stopped automatically as a function of:
1. Defined Scaling Strategy
- hot Robots count - their machines are always running.
- cold Robots count - their machines will be allocated/deallocated dynamically.
2. Client’s Current State:
- Jobs (pending, running, completed, stopped, faulted)
- Robots (available, disconnected, busy)
Solution Components
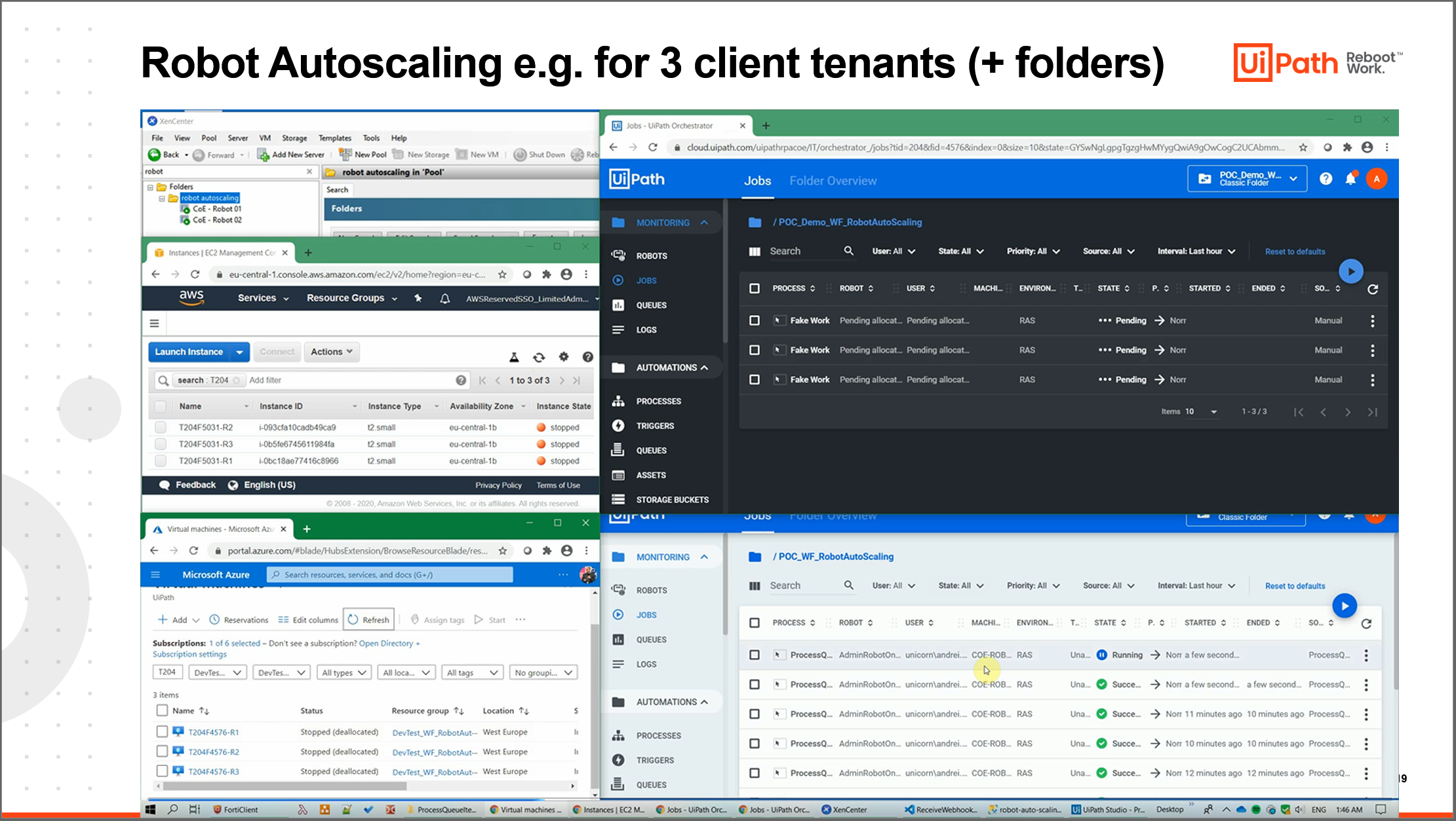
1. Client Tenants – Orchestrator Webhooks
The managed clients need to have configured in the Webhooks area the URL associated with the Webhook Receiver’s endpoint for the events job created / completed / faulted / stopped. These events act as triggers for the autoscaling process and they are processed in bulk, to minimize concurrency risk for servers start / stop operations.
2. Database
The SQL Server database with the client Orchestrator access data + AutoScaling Strategy robot counters can be deployed anywhere and it only contains the Tenants table (SQL create script provided). The connection to the DB is done with the UiPath.Database activities – the connection string is retrieved from the TenantsDbConnectionString text Orchestrator asset (from the Management Orchestrator).
3. Webhook Receiver. Webservice / Function
This component consists of minimal code that is designed to receive events, parse their data and forward them to the Management Orchestrator as new queue items.
4. Management Orchestrator
Most of the RAS solution items are to be configured in an Orchestrator tenant, in a dedicated folder: Processes (ProcessQueueItems, ..), Assets (for DB connection, infrastructure access), Queue + Job Trigger (on new item added). The RAS solution can be deployed in the same Orchestrator tenant as one of the managed clients, as long as it is configured in a folder that is not associated with a client from the DB.
Process Flow. Event Driven
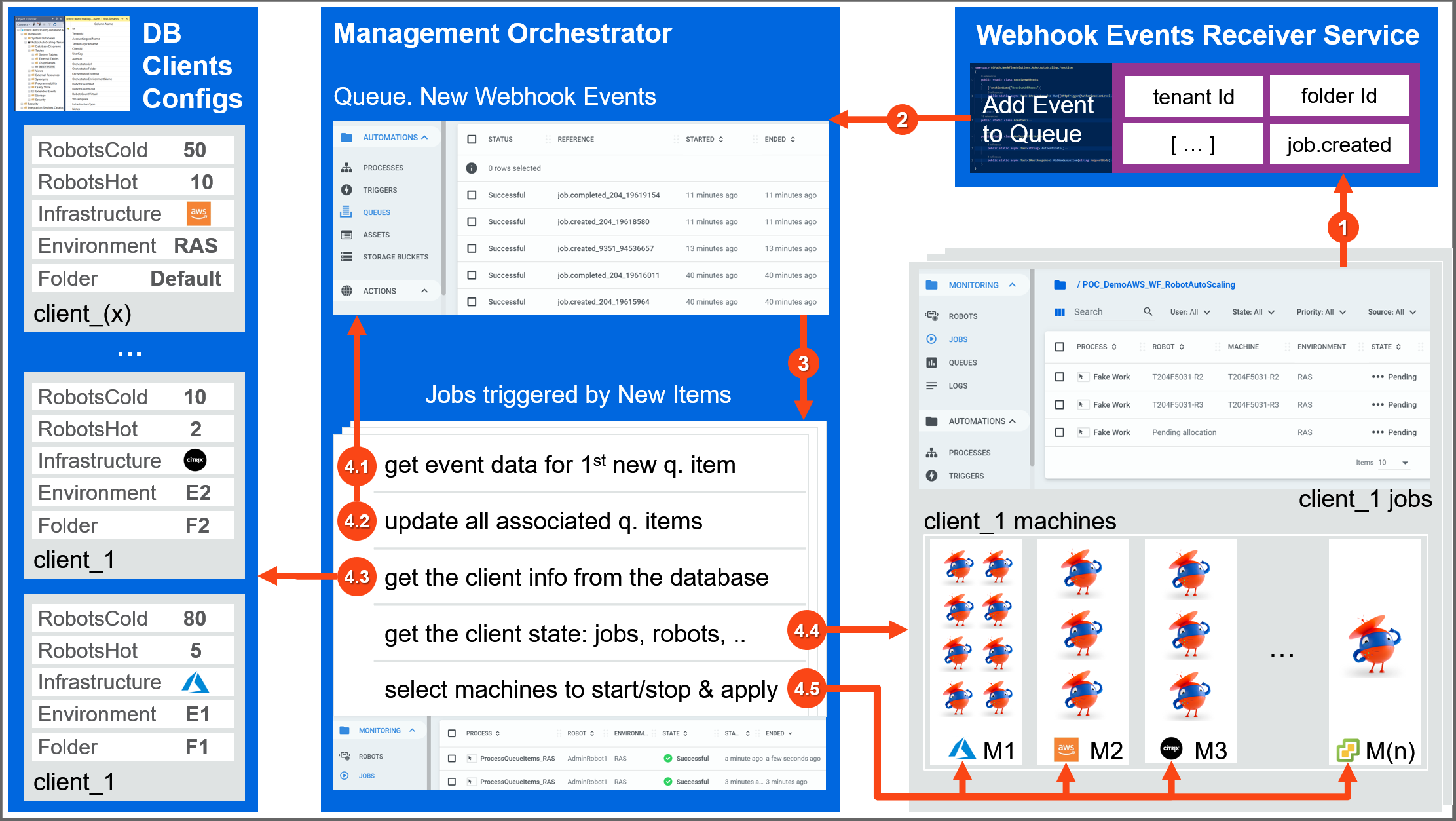
One deployment of the RAS solution can perform autoscaling for multiple clients at the same time – this is possible by leveraging the Orchestrator’s capability to emit job events via webhooks. The job events that are incoming from the managed clients are received by a small web-service / function and forwarded to a Queue in the Management Orchestrator for processing.
As part of the processing step, a ProcessClient job connects to the Database and tries to identity the client of an event in the Tenants table - if found, the information from the selected row has the client Orchestrator API acces data + the scaling strategy for the client’s folder or folder+environment.
The processing job connects to the client’s Orchestrator and retrieves its current state (jobs running/pending, robots available/disconnected/busy). With all the data available, the job will evaluate the state + scaling strategy robot counters, selects the impacted robot machines and proceeds to apply the neccesary actions (start / stop server).
Process Flow. Scheduled (pooling)
This mode doesn’t require any of the job events related RAS components (webhooks, events receiver service, queue): the autoscaling process is triggered periodically (scheduled start at each 5+ min), according to a specified scheduled processing job (1 for each client DB entry).
Notes
- The current version works with both classic and modern folders and can allocate/deallocate robot machines from Azure, AWS, Google Cloud, VMware, Citrix.
- Next releases will add support for Hyper-V.
Features
Features
Cost savings with IT Infrastructure and more efficient RPA Operations.
Additional Information
Additional Information
Dependencies
UiPath IT Automation Activities
Code Language
Visual Basic
License & Privacy
MIT
Privacy Terms
Technical
Version
2.1.6Updated
October 5, 2021Works with
Studio: 21.10 - 22.10
Certification
Silver Certified
Application
Collections
Support
UiPath Community Support
Resources